Understanding Self-driving cars level by level
/cdn.vox-cdn.com/uploads/chorus_image/image/59175417/WaymoIPACE_Front.0.jpg)
Rolling leaving room without a staring wheel so advanced you can curl up for the nap in the back seat
What does Self Driving / Autonomous mean ?
Navigated and maneuvered by a computer without a need for human control or intervention under a range of driving situations and conditions:
Human Driver monitors the driving environment

Level 0: NO Automation
The full-time performance by the human driver of all aspects of the dynamic driving task, even when enhanced by warning or intervention system
Level 1: Driver Assistance
The driving mode-specific execution by a driver assistance system of either steering or acceleration/deceleration using information about the driving environment and with the expectation that the human driver perform all remaining aspects of the dynamic driving task
Level 2: Partial Automation
The driving mode-specific execution by one or more driver assistance system of both steering and acceleration/ deceleration using information about the driving environment and with the expectation that the human driver perform all remaining aspects of the dynamic driving task
Automated Driving System monitors the driving environment

Level 3: Conditional Automation
The driving mode-specific performance by an automated driving system of all remaining aspects of the dynamic driving task, with the expectation that the human driver will respond appropriately to a request to intervene
Level 4: High Automation
The driving mode-specific performance by an automated driving system of all remaining aspects of the dynamic driving task, even if a human driver does not respond appropriately to a request to intervene
Level 5: Full Automation
The full-time performance by an automated driving system of all remaining aspects of the dynamic driving task, under all roadway and environmental conditions that can be managed by a human driver
how self-driving car works ?
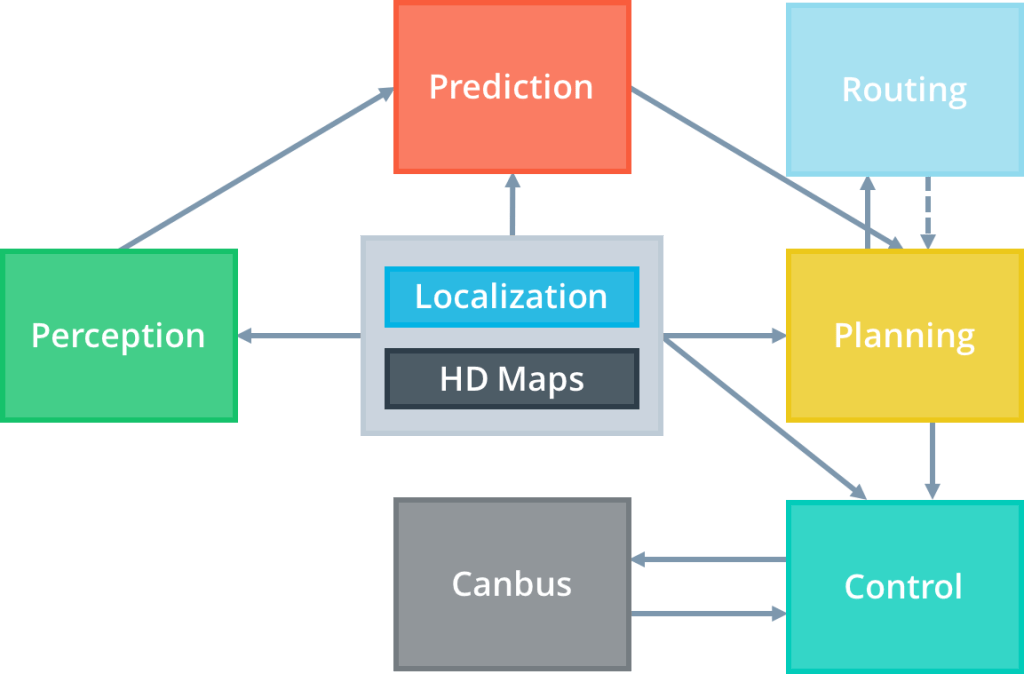
- Localization
This module provides localization services. There are two ways in which localization is provided:
The RTK (Real Time Kinematic) based method which incorporates GPS and IMU (Inertial Measurement Unit) information
The multi-sensor fusion method which incorporates GPS, IMU, and LiDAR information.
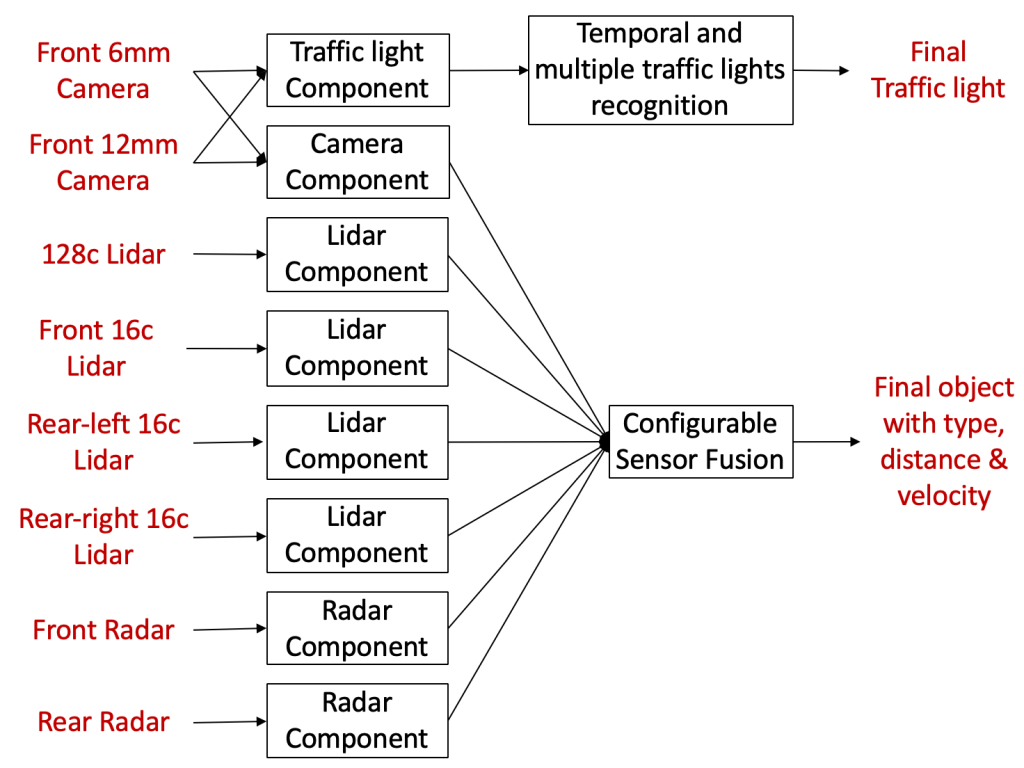
- Perception
The Perception module has been upgraded completely to handle comprehensive sensor fusion of our brand-new sensor suite and also keep up with the brand new scenario-based planning.
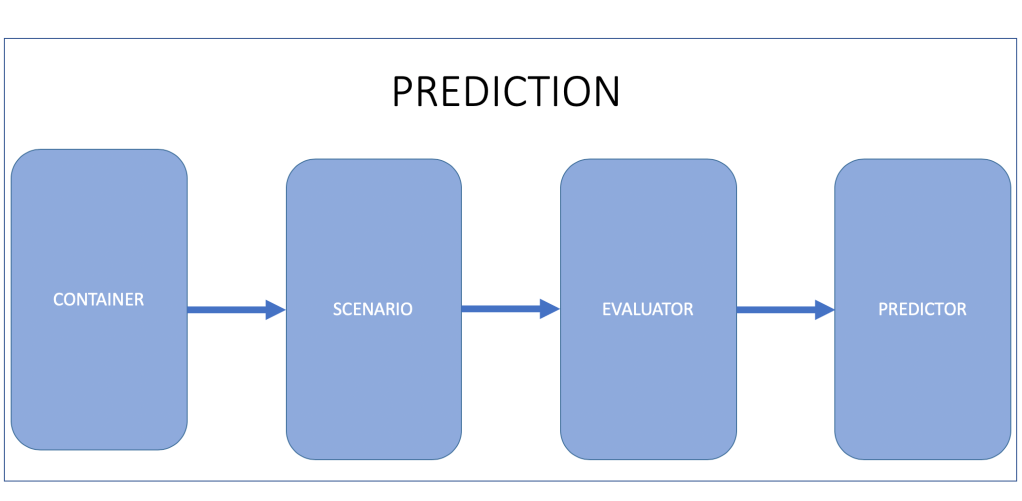
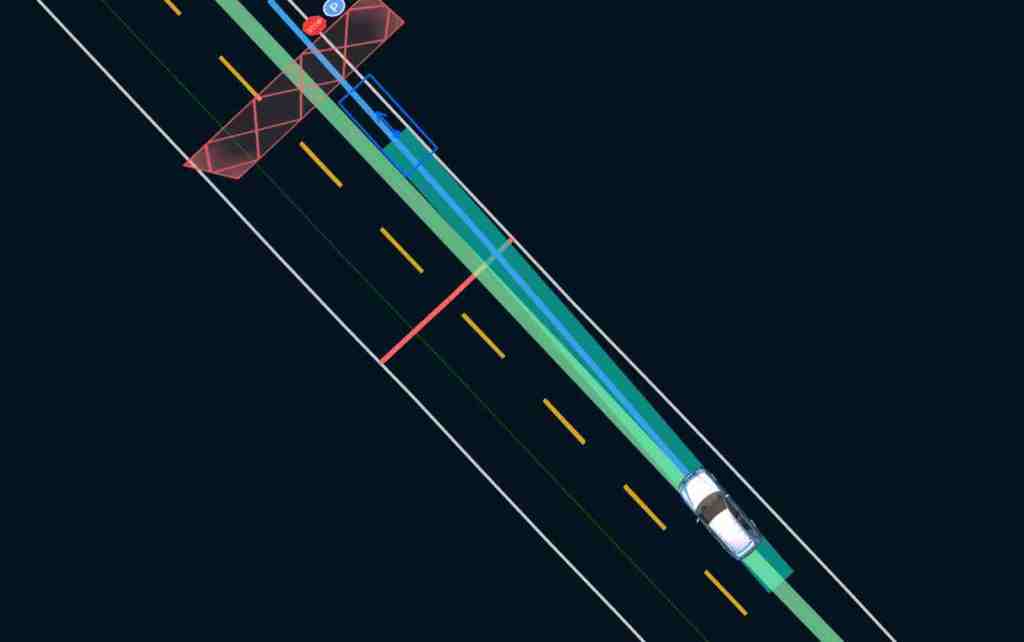
- Prediction
The Prediction module studies and predicts the behavior of all the obstacles detected by the perception module. Prediction receives obstacle data along with basic perception information including positions, headings, velocities, accelerations, and then generates predicted trajectories with probabilities for those obstacles.
- Routing
The Routing module generates high level navigation information based on requests.
- Planning
As Auto-pilot matures and takes on different road conditions and driving use cases, scenario specific and wholistic approach for planning its trajectory. In this approach, each driving use case is treated as a different driving scenario. This is useful because an issue now reported in a particular scenario can be fixed without affecting the working of other scenarios as opposed to the previous versions, wherein an issue fix affected other driving use cases as they were all treated as a single driving scenario. New version focuses on curb-to-curb autonomous driving on urban roads and introduces 2 new planning scenarios.
- Control
Based on the planning trajectory and the car’s current status, the Control module uses different control algorithms to generate a comfortable driving experience. The Control module can work both in normal and navigation modes.
Click the link of Apollo repo to know more if you’re interested
